#include <Eigen/Core>#include <roboptim/core/function.hh>#include <roboptim/core/solver.hh>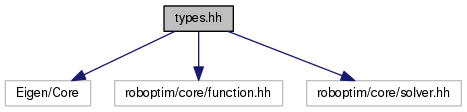
Namespaces | |
| roboptim | |
| Declaration of DistanceSegmentPoint class that computes the distance between a segment and a point. | |
| roboptim::capsule | |
Typedefs | |
| typedef roboptim::Function::value_type | roboptim::capsule::value_type |
| Import types from roboptim Function. More... | |
| typedef roboptim::Function::size_type | roboptim::capsule::size_type |
| typedef roboptim::Function::argument_t | roboptim::capsule::argument_t |
| typedef roboptim::Function::vector_t | roboptim::capsule::vector_t |
| typedef roboptim::Function::matrix_t | roboptim::capsule::matrix_t |
| typedef roboptim::Solver < roboptim::DifferentiableFunction, boost::mpl::vector < roboptim::LinearFunction, roboptim::DifferentiableFunction > > | roboptim::capsule::solver_t |
| Import solver type. More... | |
| typedef Eigen::Matrix < value_type, 3, 1 > | roboptim::capsule::point_t |
| Define geometry types. More... | |
| typedef Eigen::Matrix < value_type, 3, 1 > | roboptim::capsule::vector3_t |
| typedef std::vector< point_t > | roboptim::capsule::polyhedron_t |
| typedef std::vector< polyhedron_t > | roboptim::capsule::polyhedrons_t |

