Decorate a trajectory to make time scalable. More...
#include <roboptim/trajectory/free-time-trajectory.hh>
Public Types | |
| typedef T | fixedTimeTrajectory_t |
| Fixed point trajectory type. | |
| typedef FreeTimeTrajectory< T > | self_t |
| Self type. | |
| typedef parent_t::interval_t | interval_t |
| Import interval type. | |
Public Member Functions | |
| ROBOPTIM_DIFFERENTIABLE_FUNCTION_FWD_TYPEDEFS_ (Trajectory< T::derivabilityOrder >) | |
| Parent type and imports. | |
| FreeTimeTrajectory (const fixedTimeTrajectory_t &traj, value_type s) | |
| Constructor with fixed definition interval trajectory. | |
| FreeTimeTrajectory (const self_t &traj) | |
| virtual | ~FreeTimeTrajectory () |
| virtual jacobian_t | variationConfigWrtParam (double t) const |
| Get the variation of a configuration with respect to parameter vector. | |
| virtual jacobian_t | variationDerivWrtParam (double t, size_type order) const |
| Get the variation of a derivative with respect to parameter vector. | |
| virtual value_type | singularPointAtRank (size_type rank) const |
| Get singular point at given rank. | |
| virtual vector_t | derivBeforeSingularPoint (size_type rank, size_type order) const |
| Get left limit value of derivative at given singular point. | |
| virtual vector_t | derivAfterSingularPoint (size_type rank, size_type order) const |
| Get right limit value of derivative at given singular point. | |
| virtual void | setParameters (const vector_t &) |
| Set parameters. | |
| value_type | timeScale () const |
| Get time scale factor. | |
| size_type | getTimeScalingIndex () const |
| virtual std::ostream & | print (std::ostream &o) const |
| Display the function on the specified output stream. | |
| virtual void | normalizeAngles (size_type index) |
| Normalize angles in parameters array. | |
| const fixedTimeTrajectory_t & | getFixedTimeTrajectory () const |
| self_t * | resize (interval_t) const |
| Clone and resize a trajectory. | |
| fixedTimeTrajectory_t * | makeFixedTimeTrajectory () const |
| double | scaleTime (double t) const |
| Scale input time argument. | |
| double | unscaleTime (double t) const |
| jacobian_t | variationConfigWrtParam (StableTimePoint tp) const |
| jacobian_t | variationDerivWrtParam (StableTimePoint tp, size_type order) const |
Protected Member Functions | |
| void | impl_compute (result_ref, double) const |
| void | impl_derivative (gradient_ref g, double x, size_type order) const |
| void | impl_derivative (gradient_ref g, StableTimePoint, size_type order) const |
Decorate a trajectory to make time scalable.
Build a trajectory from an input trajectory and a time scale factor.
| typedef T roboptim::trajectory::FreeTimeTrajectory< T >::fixedTimeTrajectory_t |
Fixed point trajectory type.
| typedef parent_t::interval_t roboptim::trajectory::FreeTimeTrajectory< T >::interval_t |
Import interval type.
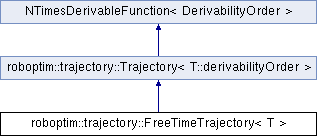
Reimplemented from roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| typedef FreeTimeTrajectory<T> roboptim::trajectory::FreeTimeTrajectory< T >::self_t |
Self type.
| roboptim::trajectory::FreeTimeTrajectory< T >::FreeTimeTrajectory | ( | const fixedTimeTrajectory_t & | traj, |
| value_type | s | ||
| ) |
Constructor with fixed definition interval trajectory.
| traj | trajectory defining this one by reparameterization |
| s | time scale |
| roboptim::trajectory::FreeTimeTrajectory< T >::FreeTimeTrajectory | ( | const self_t & | traj | ) |
| roboptim::trajectory::FreeTimeTrajectory< T >::~FreeTimeTrajectory | ( | ) | [virtual] |
| FreeTimeTrajectory< T >::vector_t roboptim::trajectory::FreeTimeTrajectory< T >::derivAfterSingularPoint | ( | size_type | rank, |
| size_type | order | ||
| ) | const [virtual] |
Get right limit value of derivative at given singular point.
| rank | rank of the singular points. |
| order | order of derivation. |
| derivative | Limit of the derivative at singular point for decreasing parameter values. |
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| FreeTimeTrajectory< T >::vector_t roboptim::trajectory::FreeTimeTrajectory< T >::derivBeforeSingularPoint | ( | size_type | rank, |
| size_type | order | ||
| ) | const [virtual] |
Get left limit value of derivative at given singular point.
| rank | rank of the singular points. |
| order | order of derivation. |
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| const fixedTimeTrajectory_t& roboptim::trajectory::FreeTimeTrajectory< T >::getFixedTimeTrajectory | ( | ) | const [inline] |
| size_type roboptim::trajectory::FreeTimeTrajectory< T >::getTimeScalingIndex | ( | ) | const [inline] |
| void roboptim::trajectory::FreeTimeTrajectory< T >::impl_compute | ( | result_ref | res, |
| double | t | ||
| ) | const [protected] |
ROBOPTIM_DO_NOT_CHECK_ALLOCATION
| void roboptim::trajectory::FreeTimeTrajectory< T >::impl_derivative | ( | gradient_ref | g, |
| double | x, | ||
| size_type | order | ||
| ) | const [protected] |
ROBOPTIM_DO_NOT_CHECK_ALLOCATION
| void roboptim::trajectory::FreeTimeTrajectory< T >::impl_derivative | ( | gradient_ref | g, |
| StableTimePoint | stp, | ||
| size_type | order | ||
| ) | const [protected, virtual] |
ROBOPTIM_DO_NOT_CHECK_ALLOCATION
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| fixedTimeTrajectory_t* roboptim::trajectory::FreeTimeTrajectory< T >::makeFixedTimeTrajectory | ( | ) | const [inline] |
| void roboptim::trajectory::FreeTimeTrajectory< T >::normalizeAngles | ( | size_type | index | ) | [virtual] |
Normalize angles in parameters array.
Make sure angles are continuous.
| index | Angles index in parameter array. |
Reimplemented from roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| std::ostream & roboptim::trajectory::FreeTimeTrajectory< T >::print | ( | std::ostream & | o | ) | const [virtual] |
Display the function on the specified output stream.
| o | output stream used for display |
Reimplemented from roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| self_t* roboptim::trajectory::FreeTimeTrajectory< T >::resize | ( | interval_t | timeRange | ) | const [inline, virtual] |
Clone and resize a trajectory.
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
References roboptim::trajectory::FreeTimeTrajectory< T >::scaleTime(), roboptim::trajectory::Trajectory< DerivabilityOrder >::timeRange(), roboptim::trajectory::Trajectory< T::derivabilityOrder >::timeRange(), and roboptim::trajectory::tMax.
| roboptim::trajectory::FreeTimeTrajectory< T >::ROBOPTIM_DIFFERENTIABLE_FUNCTION_FWD_TYPEDEFS_ | ( | Trajectory< T::derivabilityOrder > | ) |
Parent type and imports.
| double roboptim::trajectory::FreeTimeTrajectory< T >::scaleTime | ( | double | t | ) | const |
Scale input time argument.
Scale input argument with the same factor that the input trajectory:
![\[t' = t_{min} + \lambda * (t - t_{min})\]](form_5.png)
where ![$[t_{min}, t_{max}]$](form_6.png) is the input trajectory time range and
is the input trajectory time range and
![\[\lambda\]](form_7.png)
the scale factor.
| t | input time |
References roboptim::trajectory::detail::fixTime().
Referenced by roboptim::trajectory::FreeTimeTrajectory< T >::resize().
| void roboptim::trajectory::FreeTimeTrajectory< T >::setParameters | ( | const vector_t & | ) | [virtual] |
Set parameters.
| vector_t | parameters. |
| std::runtime_error |
Reimplemented from roboptim::trajectory::Trajectory< T::derivabilityOrder >.
References roboptim::trajectory::removeScaleFromParameters(), and roboptim::trajectory::detail::unscaleInterval().
| FreeTimeTrajectory< T >::value_type roboptim::trajectory::FreeTimeTrajectory< T >::singularPointAtRank | ( | size_type | rank | ) | const [virtual] |
Get singular point at given rank.
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| FreeTimeTrajectory< T >::value_type roboptim::trajectory::FreeTimeTrajectory< T >::timeScale | ( | ) | const |
Get time scale factor.
| double roboptim::trajectory::FreeTimeTrajectory< T >::unscaleTime | ( | double | t | ) | const |
References roboptim::trajectory::detail::fixTime(), and roboptim::trajectory::tMax.
| FreeTimeTrajectory< T >::jacobian_t roboptim::trajectory::FreeTimeTrajectory< T >::variationConfigWrtParam | ( | double | t | ) | const [virtual] |
Get the variation of a configuration with respect to parameter vector.
| t | value  in the definition interval. in the definition interval. |
![\[\frac{\partial\Gamma_{\textbf{p}}(t)}{\partial\textbf{p}}\]](form_27.png)
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| FreeTimeTrajectory< T >::jacobian_t roboptim::trajectory::FreeTimeTrajectory< T >::variationConfigWrtParam | ( | StableTimePoint | tp | ) | const [virtual] |
| FreeTimeTrajectory< T >::jacobian_t roboptim::trajectory::FreeTimeTrajectory< T >::variationDerivWrtParam | ( | double | t, |
| size_type | order | ||
| ) | const [virtual] |
Get the variation of a derivative with respect to parameter vector.
| t | value in the definition interval. |
| order | order  of the derivative. of the derivative. |
![\[ \frac{\partial}{\partial\textbf{p}} \left(\frac{d^r\Gamma_{\textbf{p}}}{dt^r}(t)\right) \]](form_28.png)
Implements roboptim::trajectory::Trajectory< T::derivabilityOrder >.
| FreeTimeTrajectory< T >::jacobian_t roboptim::trajectory::FreeTimeTrajectory< T >::variationDerivWrtParam | ( | StableTimePoint | tp, |
| size_type | order | ||
| ) | const [virtual] |

