Nonlinear solver. More...
#include <roboptim/core/plugin/nag/nag-nlp.hh>
Public Types | |
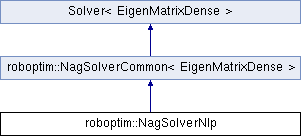
| typedef NagSolverCommon < EigenMatrixDense > | parent_t |
Public Member Functions | |
| NagSolverNlp (const problem_t &pb) | |
| virtual | ~NagSolverNlp () |
| void | solve () |
| Solve the problem. | |
| void | setIterationCallback (callback_t callback) |
| const callback_t & | callback () const |
| solverState_t & | solverState () |
Nonlinear solver.
Minimize an arbitrary smooth function subject to constraints (which may include simple bounds on the variables, linear constraints and smooth nonlinear constraints) using a sequential quadratic programming (SQP) method. As many first derivatives as possible should be supplied by you; any unspecified derivatives are approximated by finite differences. It is not intended for large sparse problems.
| typedef NagSolverCommon<EigenMatrixDense> roboptim::NagSolverNlp::parent_t |
| roboptim::NagSolverNlp::NagSolverNlp | ( | const problem_t & | pb | ) | [explicit] |
| roboptim::NagSolverNlp::~NagSolverNlp | ( | ) | [virtual] |
| const callback_t& roboptim::NagSolverNlp::callback | ( | ) | const [inline] |
Referenced by roboptim::detail::objfun().
| void roboptim::NagSolverNlp::setIterationCallback | ( | callback_t | callback | ) | [inline] |
| void roboptim::NagSolverNlp::solve | ( | ) |
Solve the problem.
References roboptim::detail::confun(), and roboptim::detail::objfun().
| solverState_t& roboptim::NagSolverNlp::solverState | ( | ) | [inline] |
Referenced by roboptim::detail::objfun().
 1.7.6.1
1.7.6.1 
